
近一年来激光雷达在车圈非常火,搭载它的车型也越来越多,尤其是新势力们的新车型,仿佛不穿一串儿都没脸见人似的。那么车载激光雷达有什么用?车载激光雷达如何分类?
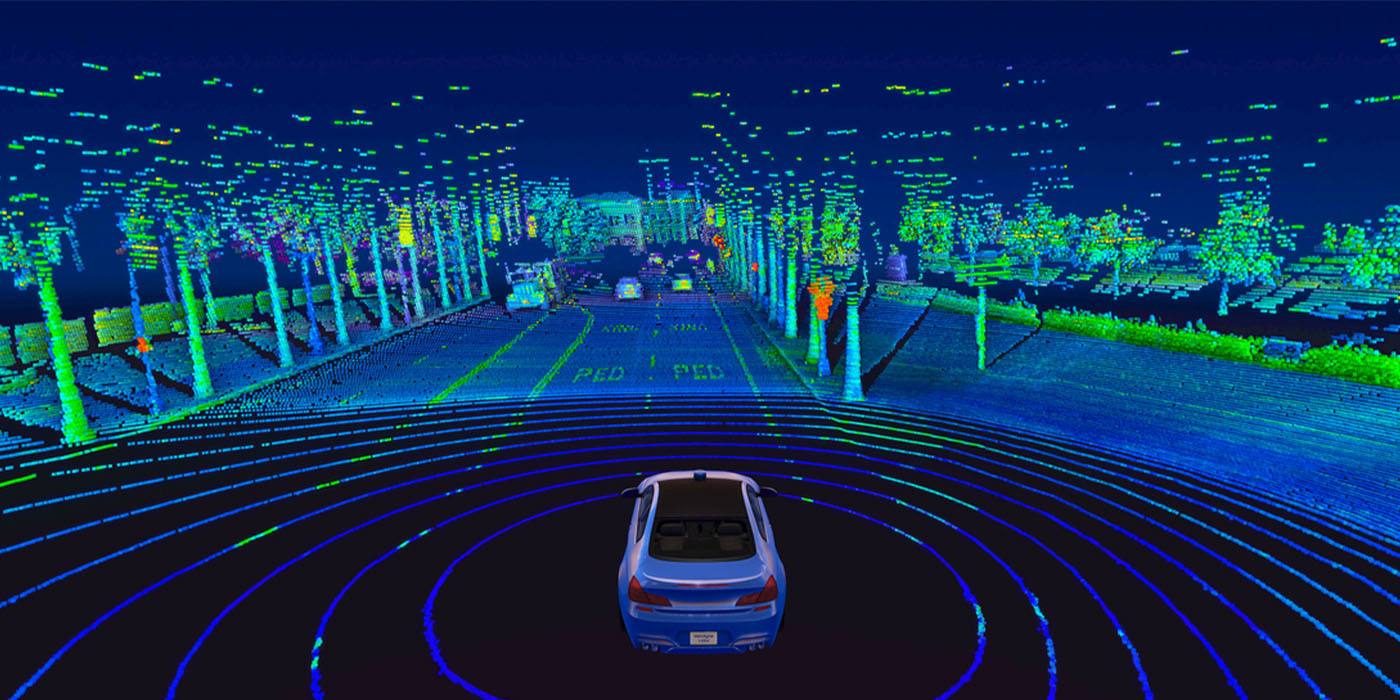
它相当于无人驾驶的眼睛,具有强大的信息感知和处理能力。目前,主要作用于自动驾驶上,也就是未来的无人驾驶。它在汽车上主要以多线束为主,可以起到帮助汽车感知道路环境,自行规划行车路线,并控制车辆达到预定目标的作用。比如根据激光遇到障碍物后的折返时间,计算目标与自己的相对距离,从而可以帮助车辆识别路口与方向。
1607年,伽利略做了一个实验,目的倒不是测距,而是测量光速。他的实验方法非常简单粗暴:他让两个人各带一盏盖着灯罩的煤油灯,跑到两个山头上待命。
两人就位后,甲会快速拽走灯罩,让煤油灯露出光芒,这也是在给另一个山头上的乙发信号。而在看到从甲那边传来的灯光时,乙也要快速拽走灯罩,让自己的灯也露出光芒,相当于告诉甲“我已收到信号”。
伽利略的想法是好的,只要知道甲最先拽走灯罩的时间点,再知道甲看到对面山头灯光亮起的时间点,那么山顶间距的两倍除以时间差就是光速。
这样“天真”的办法显然是无法准确测出光速的,不过现在的人类早已知道光速有多快,也能通过先进的设备和手段测算出一束光线从射出到返回之间的时差,进而推算出光源和反射面之间的距离。而这,就是激光雷达的测距原理,它利用的还是当年伽利略的方法。
根据结构,激光雷达分为机械式激光雷达、固态激光雷达和混合固态激光雷达。
1.机械式激光雷达
机械激光雷达,是指其发射系统和接收系统存在宏观意义上的转动,也就是通过不断旋转发射头,将速度更快、发射更准的激光从“线”变成“面”,并在竖直方向上排布多束激光,形成多个面,达到动态扫描并动态接收信息的目的。
以Velodyne生产的第一代机械激光雷达(HDL-64E)为例,竖直排列的激光发射器呈不同角度向外发射,实现垂直角度的覆盖,同时在高速旋转的马达壳体带动下,实现水平角度360度的全覆盖。因此,HDL-64E在汽车行驶过程中,就一直处于360度旋转状态中。
因为带有机械旋转机构,所以机械激光雷达外表上最大的特点就是自己会转,个头较大。
如今机械激光雷达技术相对成熟,但价格昂贵,暂时给主机厂量产的可能性较低;同时存在光路调试、装配复杂,生产周期漫长,机械旋转部件在行车环境下的可靠性不高,难以符合车规的严苛要求...等不足。
当前的激光雷达战场,机械旋转式方案占据着绝对的统治地位,目前除了美国Quanergy以外,各大主流的激光雷达供应商都是以机械旋转式的产品线为主,并以此为基础不断推进更高线数产品的迭代。比如做激光雷达起步最早、做的最大的Velodyne,主攻的就是机械激光雷达,其机械激光雷达目前可做到128线,性能非常强悍。

2.混合固态激光雷达
2016年1月的CES消费电子展会上,Velodyne展示了“混合固态超级冰球”(Solid-State Hybrid Ultra Puck Auto),由此引入了混合固态激光雷达的概念。
机械式激光雷达在工作时发射系统和接收系统会一直360度地旋转,而混合固态激光雷达工作时,单从外观上是看不到旋转的,巧妙之处是将机械旋转部件做得更加小巧并深深地隐藏在外壳之中。
业内普遍认为,混合固态激光雷达指用半导体“微动”器件(如MEMS扫描镜)来代替宏观机械式扫描器,在微观尺度上实现雷达发射端的激光扫描方式。MEMS扫描镜是一种硅基半导体元器件,属于固态电子元件;但是MEMS扫描镜并不“安分”,内部集成了“可动”的微型镜面;由此可见MEMS扫描镜兼具“固态”和“运动”两种属性,故称为“混合固态”。
对于激光雷达来说,MEMS最大的价值在于:原本为了机械式激光雷达实现扫描,必须使激光发射器转动。而MEMS微机电系统可以直接在硅基芯片上集成体积十分精巧的微振镜,由可以旋转的微振镜来反射激光器的光线,从而实现扫描。
这样一来,激光雷达本身不用再大幅度地进行旋转,可以有效降低整个系统在行车环境出现问题的几率。另外,主要部件运用芯片工艺生产之后,量产能力也得以大幅度提高,有利于降低激光雷达的成本,可以从上千乃至上万美元降低到数百美元。
老牌激光公司日本先锋,利用原本用于扫描激光影碟的光学头,来生产MEMS激光雷达。该公司曾表示“当订单达到100万,先锋便可以把价格控制在100美元以下,预计会在2019年开始量产。”
3.固态激光雷达:OPA与Flash固态激光雷达
相比于机械式激光雷达,固态激光雷达结构上最大的特点就是没有了旋转部件,个头相对较小。
固态激光雷达的优点包括了:数据采集速度快,分辨率高,对于温度和振动的适应性强;通过波束控制,探测点(点云)可以任意分布,例如在高速公路主要扫描前方远处,对于侧面稀疏扫描但并不完全忽略,在十字路口加强侧面扫描。而只能匀速旋转的机械式激光雷达是无法执行这种精细操作的。
从使用的技术上,固态激光雷达分为OPA固态激光雷达和Flash固态激光雷达。
(1)OPA固态激光雷达
OPA(optical phased array)光学相控阵技术。对军事有所了解的读者,应该会知道相控阵雷达,美海军宙斯盾舰上那一块蜂窝状的“板子”就是它。
而光学相控阵使用的即是原理相同的技术。OPA运用相干原理(类似的是两圈水波相互叠加后,有的方向会相互抵消,有的会相互增强),采用多个光源组成阵列,通过控制各光源发光时间差,合成具有特定方向的主光束。然后再加以控制,主光束便可以实现对不同方向的扫描。
相对于MEMS,这一技术的电子化更加彻底,它完全取消了机械结构,通过调节发射阵列中每个发射单元的相位差来改变激光的出射角度。
因为没有任何机械结构,自然也没有旋转。所以相比传统机械式雷达,OPA固态激光雷达有扫描速度快、精度高、可控性好、体积小等优点。但也易形成旁瓣,影响光束作用距离和角分辨率,同时生产难度高。
比如Quanergy研发的“固态”Solid State激光雷达,就是OPA激光雷达,其满足了激光雷达小型化的大趋势,整个尺寸只有90mmx60mmx60mm。用到的核心的技术有光学相控阵列Optical Phased Array、光学集成电路Photonic IC、远场辐射方向图Far Field Radiation Pattern,完全没有机械固件。
(2)Flash固态激光雷达
Flash原本的意思为快闪。而Flash激光雷达的原理也是快闪,不像MEMS或OPA的方案会去进行扫描,而是短时间直接发射出一大片覆盖探测区域的激光,再以高度灵敏的接收器,来完成对环境周围图像的绘制。
因此,Flash固态激光雷达属于非扫描式雷达,发射面阵光,是以2维或3维图像为重点输出内容的激光雷达。某种意义上,它有些类似于黑夜中的照相机,光源由自己主动发出。
Flash固态雷达的一大优势是它能快速记录整个场景,避免了扫描过程中目标或激光雷达移动带来的各种麻烦。不过,这种方式也有自己的缺陷,比如探测距离较近。
卡耐基梅隆大学机器人专家Sanjiv Singh认为:
“像素越大,你要处理的信号就越多。将海量像素塞进光电探测器,必然会带来各种干扰,其结果就是精度的下降。”
这意味着Flash固态激光雷达没有“远视眼”,在实际使用中不适合远程探测,而业内专家坚信,全自动驾驶汽车上搭载的激光雷达至少一眼就得看到200到300米外的物体。
其实Flash固态激光雷达的成本还是相对低,但基于3D Flash技术的固态激光雷达,在技术的可靠性方面还存在问题。

相比于机械激光雷达,MEMS激光雷达体积更小,价格更低廉,更适合大规模应用;同时相比于OPA和Flash,MEMS在技术上更容易实现。因此,MEMS被各大主机厂商一致看好,近些年入局MEMS激光雷达研究的企业很多。
业内人士认为,未来,中远距离激光雷达将是MEMS固态的天下。
 添加微信客服咨询
添加微信客服咨询